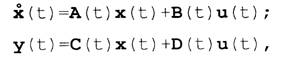
Рисунок 2.1 - Схема моделі стаціонарного кола в змінних станів
Цій моделі віповідає система матричних лінійних дифернційних рівнянь наступного вигляду [ ]:
 (2.1)
(2.1)
де A(t) - системна матриця коефіцієнтів;
B(t) - матриця входу;
C(t) - матриця виходу;
D(t) - матриця обходу.
Якщо модель стаціонарна, то системні матриці A,B,C,Dвід часу не залежать.
2.2 Опис стационарної динамічної системи рівняннями стану у непрерервному часі
Схема стационарної непрерервної системи в змінних стану , яка показана на рисунку 2.1, може бути складена на основі знайденої передаточної функції методом прямого програмування [ ].

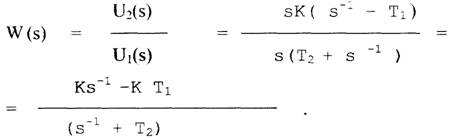
Введемо позначення:
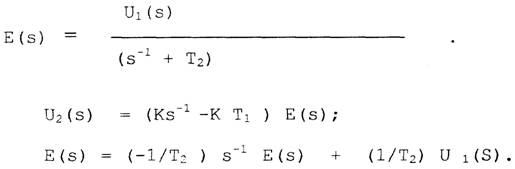
Додержуючись вищенаведених рівнянь, складемо схему моделі динамчного кола в змінних стану. Ця схема складена з інтеграторів, підсилювачів та сумуючих пристроїв і показана на рисунку 2.2.
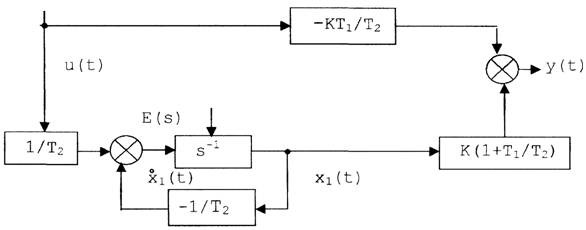
Рисунок 2.2 - Модель лінійного кола в термінах змінних станів
Таким чином сукупність рівнянь приймає вигляд:

Таким чином розглянута система рівнянь по вигляду співпадає з (2.1), причому системні матриці відповідно дорівнюють:
![]()
2.3 Визначення перехідної матриці стану
Поняття перехідної матриці стану з'являється при розвязуванні однорідного диференційного рівняння ![]() , яке описує еволюцію у часі вектора стану динамічної системи,що залишена сама по собі. Розв'язок цього рівняння має вигляд:
, яке описує еволюцію у часі вектора стану динамічної системи,що залишена сама по собі. Розв'язок цього рівняння має вигляд:
![]()
![]()
Матричну функцію:
![]()
прийнято називати перехідною матрицею станів. Для стаціонарних систем:
![]()
Звідси випливає, що перехідну матрицю станів можливо просто обчислювати шляхом розкладання в показниковий ряд експоненціальної функції:
 (2.3.1)
(2.3.1)
Існує ще й інший спосіб точного обчислення перехідної матриці, оснований на використанні перетворення Лапласа. Згідно [ ] цю матрицю знаходять як:
![]()
В нашому випадку зручно користуватись виразом (2.3.1):
![]()
2.4 Еквівалентне зображення лінійної непрерервної системи у дискретному часі
В процесі цифрового моделювання необхідно диференційні рівняння системи (2.1) замінити їх еквівалентами у дискретному часі, тобто різницевим рівняннями виду:

Причому системні матриці
![]()
знаходяться з співвідношень [ ]:
![]()
Покладаючи сітку дискретизації рівномірною та позначивши ![]() , з врахуванням конкретних значень x, Т маємо:
, з врахуванням конкретних значень x, Т маємо:
![]()

![]()
![]()
2.5 Дослідження динамічних властивостей лінійного кола методом математичного моделювання
2.5.1 Моделювання вільного руху з ненульовими початковими умовами
В даному розділі приведені результати математичного моделювання поведінки динамічного кола, яке знаходиться під впливом типових вхідних сигналів детермінованої природи. Моделюючі програми написані на мові програмування персональних компьютерів Turbo Pascal 7.0.
Цифрове моделювання вільного руху динамичної системи виконувалось згідно слідуючої програми:
- покладаємо u(k)= 0 для всех k=0,1,2 .п;
- покладаєм x(k) = x1(k) =1, для k=0;
- моделююче рівняння має вид:
- знімаємо залежність х1(k+1), y(k) від дискретного часу k=0,1 .п.
2.5.2 Моделювання реакції динамічної системи на одиничний імпульс
Цифрове моделювання імпульсної характеристики вимірювальної системи виконувалось згідно програми:
- покладаємо u(k)= 1 для к=0;
- покладаємо x(k)= x1(k)= 0 для k=0;
- моделююче рівняння має вид:

- знімаємо залежність х1(k+1), y(k) від дискретного часу k=0,1 .п.
2.5.3 Моделювання реакції динамічного кола на одиничну сходинкову функцію
Цифрове моделювання перехідної характеристики виконувалось згідно програми:
- покладаємо u(k)= 1 для всіх k=0,1, ., п;
- покладаємо x(k) = x1(k) =0 для к=0;
- моделююче рівняння має вид:

- знімаємо залежність х1(k+1), y(k) від дискретного часу k=0,1 .п.
Висновки
В даній роботі, використовуючи методи перетворення Лапласа та простору станів, моделювались динамічні властивості пасивного чотириполюсника мостового типу. Зроблені висновки відносно стійкості на основі аналізу вигляду перехідної та імпульсної характеристик. Проаналізовано вільний рух системи та вплив ненульових початкових умов на вході.
Список використаної літератури
1. Директор С.,Рорер Р.Введение в теорию систем. М. : Мир,1974. 464с.
2. Конспект лекцій
3. Гоноровский И.С. Радиотехнические цепи й сигнали М.: Радио й связь, 1986.
4. Баскаков С.И. Радиотехнические цепи й сигналь:. М. : «Вьісшая школа» 1989.
5. Межгосударственньїй стандарт ГОСТ 2.105-95. Единая система конструкторской документации. Общие требования к текстовьім документам. Киев. Гсстандарт Украйни 1996.
6. Рабинер Л. Гоулд Б. Теория применение цифровой обработки сигналов. М:. Мир , 1978.
ДОДАТКИ
ДОДАТОКА
Частотні характристики мостової схеми
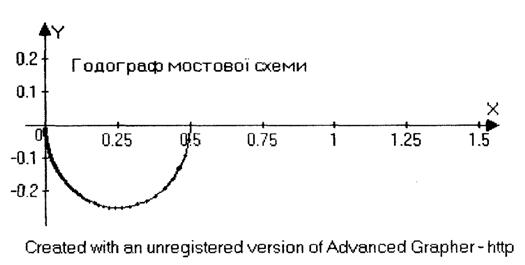
Рисунок А1 - Годограф мостовіої схеми
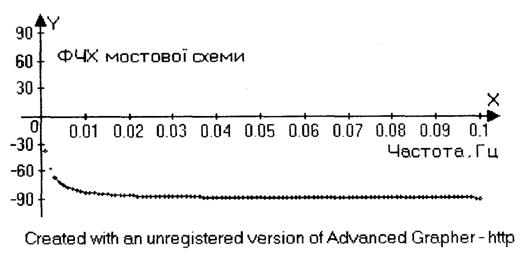
Рисунок А2 - Фазо-частотна храктеристика мостової схеми
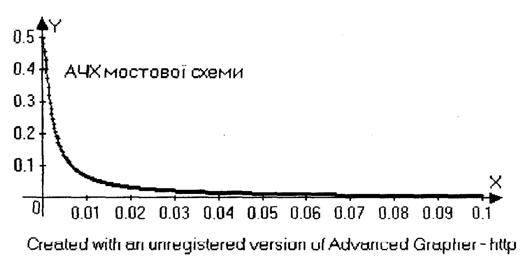
Рисунок A3 - Амплітудно-частотна характеристика мостової схеми